Researchers at Intel Labs have developed a smart robot that anyone with a smartphone can build, using open source code, a 3D printer, and $50. What is different with this 3D printed robot is that the smartphone isn’t just used to control the robot, as with devices such as MobBob or Qualcomms Micro Rover, but is used directly as the ‘brains’ of the bot, leveraging the advanced features and operating systems in today’s smartphones to enable high-quality sensing and computation, while improving affordability, accessibility and scalability—all within a $50 budget (not including the smartphone).
While there have been efforts previously at making robot technology affordable and scalable, compromises have been made either in design, functionality, or performance. Relatively expensive robots in this area of research can cost between $2,000-$5,000, while mobile-based robots are significantly less expensive, yet still fall between $250-500 in cost, such as the AWS DeepRacer, DJI Robomaster S1, Nvidia JetBot, and DukieBot.
As the study says, “the aforementioned projects use the smartphone as a remote control for teleoperation, offload data to a server for processing, or rely on commercial or outdated hardware and software. In contrast, our platform turns a smartphone into the brain of a fully autonomous robot with onboard sensing and computation.”
With this approach, Intel researchers have leveraged the advantages of today’s smartphones to enable navigation and real-time sensing and computation for a wheeled robot body that costs less than $50. The features of smartphones that make this possible include advanced imaging technology, processing power, navigation, connectivity, sensors, AI accelerators for neural network inference, rapidly upgraded and evolving software and hardware ecosystems. In turn, the ‘OpenBot’ is capable of advanced applications such as person following and autonomous navigation.
While a large part of the cost, about 40%, is that of the batteries, the price can be further reduced by scaling production, as more units are made. The top plate with the phone mount and the bottom cover, weighing 146g and 103g respectively, are 3D printed in PLA and take about 23 hours in total to 3D print using an Ultimaker.

Image Courtesy of Intel Labs
The Android application allows for connectivity, processing and audiovisual sensory inputs (camera, gyroscope, accelerometer, magnetometer, ambient light sensor, barometer). Common game controllers can be connected via Bluetooth to remotely operate the OpenBot. The learning-based algorithms, unlike classic motion planning algorithms, uses neural network processing to detect objects or people, and navigate autonomously.
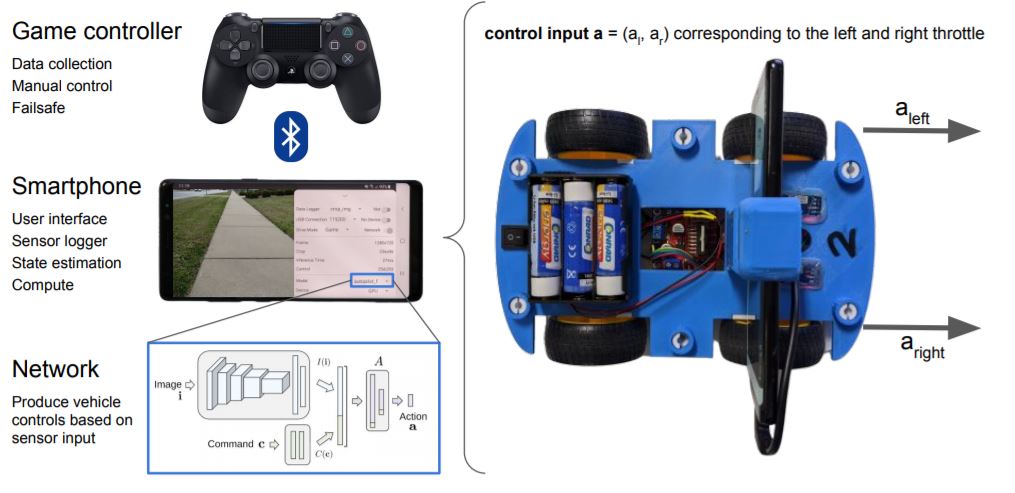
OpenBot smartphone-based system Image Courtesy of Intel Labs
Explaining the difference it makes in using an widely available, constantly upgraded, open-platform such as Android, as opposed to specific custom software solutions, the study states,
“In contrast to other robots, our platform has an abundance of processing power, communication interfaces, and sensors provided by the smartphone. Existing robots often rely on custom software ecosystems, which require dedicated lab personnel who maintain the code, implement new features, and implement drivers for new sensors. In contrast, we use Android, one of the largest constantly evolving software ecosystems. All the low-level software for sensor integration and processing already exists and improves without any additional effort by the robotics community. All sensors are already synchronized on the same clock, obviating what is now a major challenge for many existing robots.”
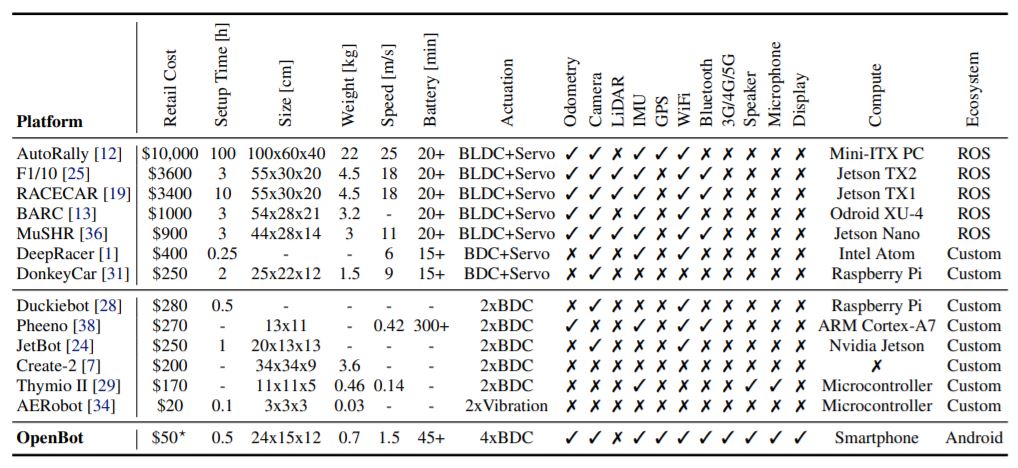
Comparison of Wheeled-robotics solutions Image Courtesy of Intel Labs
The advantages of this approach to improving the accessibility and scalability in robotics is more than obvious when comparing the features and specifications across wheeled-robotics platforms. With nearly all the features available, an open Android operating system, using any smartphone available today, not only to control, but to drive learning-based algorithms and AI-based applications in person following and autonomous navigation, and its cost-effectiveness, the OpenBot from Intel Labs is leaps and bounds ahead of any other low-cost robotic solution available publicly.
The post Intel Develops $50 3D Printed OpenBot to Advance Robotics Accessibility appeared first on 3DPrint.com | The Voice of 3D Printing / Additive Manufacturing.