Peter Naftaliev is an artificial intelligence (AI) researcher and consultant who is working in making 2D into 3D. Besides work for his company Abelians, he also publishes breakthrough research at his blog here and uses his 15 years of machine learning experience to teach the technology. If you’re interested in Project Management for Machine Learning, or were looking for a Deep Learning Dictionary, or want to write your own patent, Naftaliev is a wealth of information.
Naftaliev first came to our attention when he published work showing us how to take a 2D image and turn it into a possibly 3D-printed file. Creating 3D content, moreover 3D printable 3D content is difficult. CAD is still too complex for most people and 3D scanning works, but is finicky. Everyone can either draw or take photos that lead to digital 2D content, however. If we could easily take 2D data and make it 3D printable, one could much more easily make their own 3D-printed products, let consumers mass-customize things or make custom-fit things like shoe soles.
So, Naftaliev’s work on the cutting edge of AI and 3D printing is, to me, of potential crucial importance to the future of 3D printing. Eventually raw computing power, improving cameras and better software could help us get to a stage where all of our phones are 3D scanners that can be used to create 3D content easily. Until then, and also subsequently, AI and machine learning could let us take much more content and make it 3D.

Machine learning and AI, however, are kind of like a magical sauce that is supposed to make everything better for everyone all the time. I remember when 3D printing was seen in the same light. I personally tried to be a realistic, enlightening, but not dazzlingly optimistic guide for people through these hype times. For AI and the intersection of machine learning and 3D printing, Naftaliev is this person for me. Not for me alone, however.
Corona-bored Naftaliev posted on Reddit. He decided to do a Zoom call about deep learning. He had a previously prepared lecture which he couldn’t give because all of his lectures and conferences where he would speak were Corona-cancelled. So, he made a Reddit post about his online lecture. Just based on that one Reddit post, Naftaliev had 350 people sign up for his lecture. Now, he has a Reddit community that is all about “2D, 3D and AI. Video, image, 3D modeling, depth maps, neural networks.” You can subscribe to the newsletter here or the meetup here to be kept abreast of goings-on.
Enthused by this, he continued with talks on:
“image processing, AI, 3d modeling, technological advancements . But, more importantly, it is a step to try to democratize access to information to anyone around the world. Academic research and papers can be very hard to figure out even for people who are working in the subject. Reading just one paper and truly understanding what is going on can take several good days of work and sometimes requires access to people who have knowledge in the field. And, what’s more, a lot of the research does not come with an open source where you can try to test things out yourself (it is extremely hard to replicate the code and results of a paper, if not impossible because of access to training data and computational resources). The research that does come with code many times is still hard to figure out, sometimes there are bugs or things in the code that do not align with the research. I want to help make all of this more accessible to people everywhere.”
He feels that “if I or anyone else has put the time and effort to understand some new research that is out, why not share it with others.” He does each live lecture twice, once for the east side of the planet, once for the west. He then offers these lectures for download. The next lecture deals with generating art using neural networks.
In the future he hopes “to get the authors of the most important researches in our field to come and present their papers, code and the latest advancements – live, online, for anyone who is interested in learning more.” The lectures are clear and super interesting but not necessarily for casual viewing, so paying attention helps. Naftaliev means for them to be for,
“People anywhere in the world with technical orientation who are interested in machine learning, or are already full-fledged practitionersresearchers who want to expand their understanding of sub-topics in this sphere. We are also touching the boundary of digital art, so people from the digital arts that want to see what the latest technological research in the field can do and how they can use it for their art.”
In terms of background,
“Mathematical and programming background is a plus. We do explain basic concepts in machine learning if we see that the audience is not fully familiar with them. Every participant who signs in to listen to a lecture fills out a small bio about himself so we know how much intro material we need to explain and how deep we can dive.
Naftaliev hopes that you can learn,
“Which papers and open source findings are interesting and relevant, the current state of the art results and how to replicate them, current technological limitations in industry and academia, expend your horizons about what is possible to achieve with AI in everything to do with image processing, 3D modeling, signal processing and more. I am also experimenting with allowing people to get to know each other and form connections around the world by sharing these common interests.”
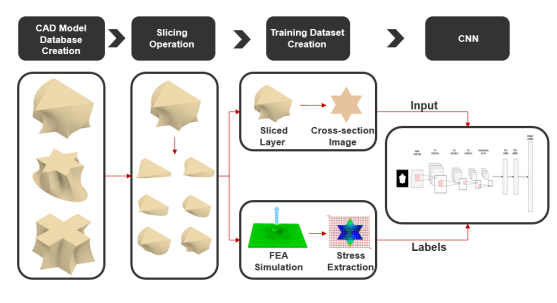
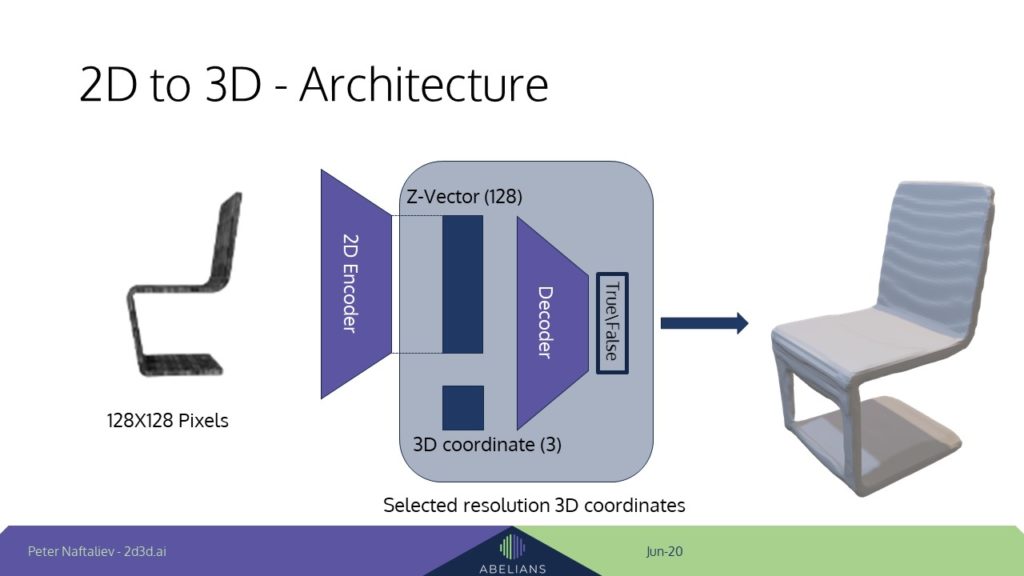
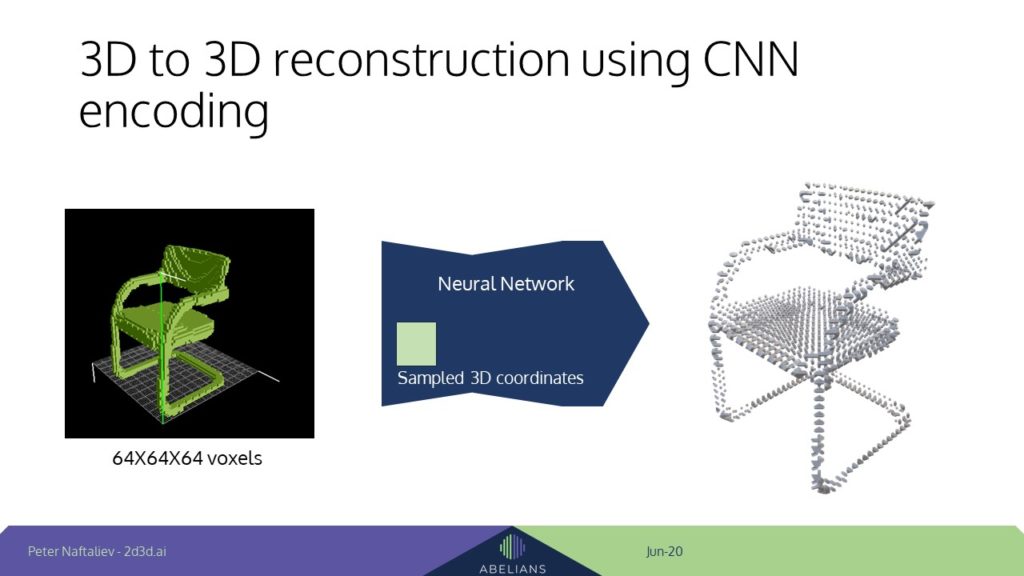
You can find the YouTube channel here. Below you can see how you can go from 2D to 3D using neural nets.
I think that this is fascinating and, with Naftaliev’s help, you can be transported to the cutting edge of making 2D 3D and understand more about machine learning. I really think that this is an emerging frontier for our industry and am very grateful that Naftaliev will be giving this series of lectures. Subscribe here.
A lecture by a guest Dr. Eyal Gruss, Fake Anything the Art of Deep Learning is here.
The post Peter Naftaliev Lecture Series on Learning on How to Go from 2D to 3D with Machine Learning appeared first on 3DPrint.com | The Voice of 3D Printing / Additive Manufacturing.










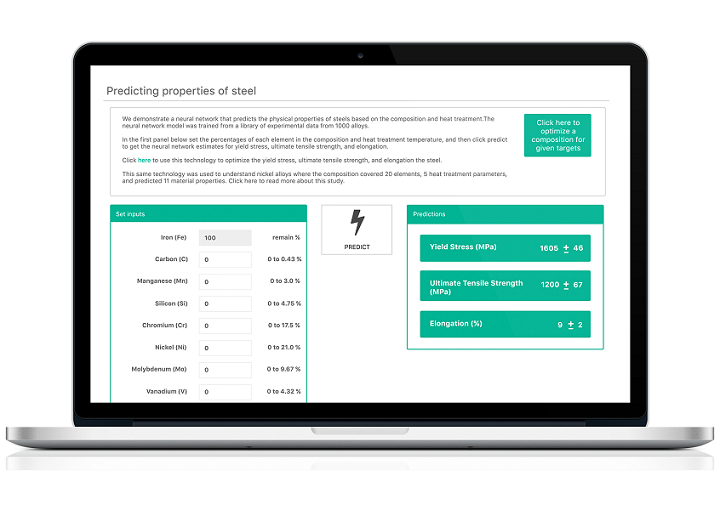
 engine can quickly, efficiently and accurately propose new materials with target properties – speeding up the development process,” said Gareth, who is also a Royal Society University Research Fellow at the University of Cambridge. “The potential for this technology in the field of direct laser deposition and across the wider materials sector is huge – particularly in fields such as 3D printing, where new materials are needed to work with completely different production processes.”
engine can quickly, efficiently and accurately propose new materials with target properties – speeding up the development process,” said Gareth, who is also a Royal Society University Research Fellow at the University of Cambridge. “The potential for this technology in the field of direct laser deposition and across the wider materials sector is huge – particularly in fields such as 3D printing, where new materials are needed to work with completely different production processes.”