
Researchers from the Singapore University of Technology and Design (SUTD) and Southern University of Science and Technology (SUSTech) in Shenzhen, China, have proposed a method of fabricating microlens arrays using oscillation-assisted digital light processing (DLP) 3D printing. A microlens array consists of multiple micron-sized lenses with optical surface smoothness. Typically, most 3D printing methods have […]
Architecture Intelligence Research Lab at SUTD Installs 3D Printed Pavilion for Mid-Autumn Festival
![]() The first fully functional 3D printed structure was designed and built in Singapore recently by students under the direction of architects and professors at Singapore University of Technology and Design (SUTD). The research group, Architecture Intelligence Research Lab (AirLab), at SUTD, created the structure—called AirMesh—and installed it for use as a pavilion at Gardens by the Bay. This site also coincides with the Mid-Autumn Festival 2019.
The first fully functional 3D printed structure was designed and built in Singapore recently by students under the direction of architects and professors at Singapore University of Technology and Design (SUTD). The research group, Architecture Intelligence Research Lab (AirLab), at SUTD, created the structure—called AirMesh—and installed it for use as a pavilion at Gardens by the Bay. This site also coincides with the Mid-Autumn Festival 2019.
Airmesh has been in the works for five years now at SUTD with Professors Carlos Bañon and Felix Raspall. Employing the most classic benefits of 3D printing, the group’s goal was to create products with ‘extreme lightness’ as well as making a structure optimized for high performance. The team worked together from a common point of inspiration: a 3D neural network concept that is not only interconnected but ‘extremely redundant.’

The design makes up the world’s first space frame, following Eurocode regulations, approved by Singapore Building Construction Authority (BCA) for a short time of occupation. The ‘digitally-crafted belvedere’ will be installed and open to visitors for the following three years.
“As the first of its kind, it fosters Singapore’s design and innovation edge. AirMesh structural prowess pushes the limit of slenderness and therefore aims to inspire dare and curiosity in users,” said Bañon, Lead Designer.


The designers were able to create the lightweight structure due to the tetrahedral configuration, bearing the load of 200 linear elements coming together in 54 parametric bespoke 3D printed nodes. Described also as an ‘ethereal pavilion,’ the structure is situated on a green slope, attached in eleven points. Its convex hull is meant to connect visitors to the following four points as the breeze and sunshine flow through:
- The Dragonfly River
- The SG50 Dome
- Entrance path
- Marina Bay Sands rooftop

Two layers of white netting adorn the structure, along with LED lights illuminating it at night.
“As the first of its kind, it fosters Singapore’s design and innovation edge. Airmesh structural prowess pushes the limit of slenderness and therefore aims to inspire dare and curiosity in users,” said Bañon.
The space frames designed here required a new level of freedom, innovative tools, and progressive technology. Assembly took two days, with manpower requiring only five as they assembled the whole pavilion, which weighs 700kg.
“Over five years, we have developed a system whereby any form can be conceptualized, fabricated and assembled by means of computer code created in our lab. It unlocks immense possibilities for future architectural designs like transportation hubs, large span roofs, and even skyscrapers,” said Anna Toh Hui, Lead Researcher, Airlab SUTD.
The research team consisted of Anna Toh Hui Ping, head researcher, working with David Rosen, Vahid Hassani, Jenn Chong, Sourabh Maheshwary, Sihan Wang, Liu Chi, Huang Kunsheng, Luo Qihuan, Aurelia Chan, and Cheong Yilei.
“With this new milestone, SUTD is proud to put Singapore at the forefront of innovation in high performance 3D printing in architecture and structural design,” said Bañon.
One of the most fascinating aspects of 3D printing today is the potential offered in architecture, whether users are creating prototypes for walls and arches, homes of the future, or even creating interactive living structures. What do you think of this news? Let us know your thoughts! Join the discussion of this and other 3D printing topics at 3DPrintBoard.com.


[Source / Images: Singapore University of Technology & Design]
The post Architecture Intelligence Research Lab at SUTD Installs 3D Printed Pavilion for Mid-Autumn Festival appeared first on 3DPrint.com | The Voice of 3D Printing / Additive Manufacturing.
Researchers develop guidelines for 3D printing miniature soft robots in high resolution
Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) and Zhejiang University (ZJU) have collaborated on the development of process flow guides for 3D printing miniature soft robotic actuators. Demonstrating the applicability of their additive manufactured actuators, the researchers have produced a soft debris remover with an integrated miniature gripper. The […]
SUTD researchers integrate functional components to 3D printed microfluidic devices
Singapore University of Technology and Design‘s (SUTD) Soft Fluidics Lab has developed a simple method to 3D print microfluidic devices integrated with fluid handling and functional components. The lab’s direct ink writing 3D printer dispenses a fast-curing flexible silicone resin on various substrates to form microchannels. Microchannels fabricated by SUTD have tunable dimensions and a […]
Researchers Use Shape Memory Polymers to Increase Stiffness of 3D Printed Soft Actuators

Conductive ink lines printed with DIW method
While soft robots are very flexible, and adaptive to more complex environments, they aren’t great at completing tasks with a high load capacity due to the low stiffness of constituent materials. Attempts have been made to use variable stiffness materials and structures in order to develop stiffness‐tunable soft actuators, but these are limited by factors such as small deformations, slow responses, and difficulty fabricating microfeatures.
 A team of researchers from the Singapore University of Technology and Design (SUTD) and Shanghai Jiao Tong University (STJU) recently published a paper, titled “Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing,” detailing their efforts to fix this issue.
A team of researchers from the Singapore University of Technology and Design (SUTD) and Shanghai Jiao Tong University (STJU) recently published a paper, titled “Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing,” detailing their efforts to fix this issue.
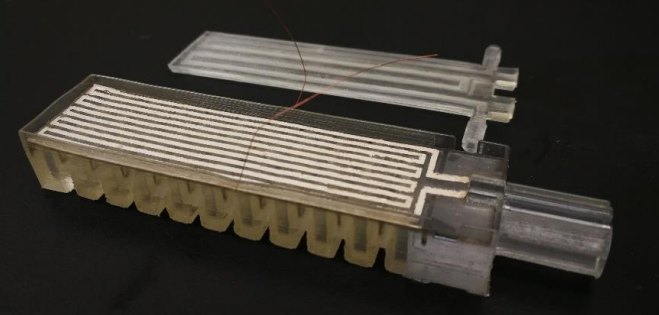
The abstract reads, “This work presents a paradigm to design and manufacture fast‐response, stiffness‐tunable (FRST) soft actuators via hybrid multimaterial 3D printing. The integration of a shape memory polymer layer into the fully printed actuator body enhances its stiffness by up to 120 times without sacrificing flexibility and adaptivity. The printed Joule‐heating circuit and fluidic cooling microchannel enable fast heating and cooling rates and allow the FRST actuator to complete a softening–stiffening cycle within 32 s. Numerical simulations are used to optimize the load capacity and thermal rates. The high load capacity and shape adaptivity of the FRST actuator are finally demonstrated by a robotic gripper with three FRST actuators that can grasp and lift objects with arbitrary shapes and various weights spanning from less than 10 g to up to 1.5 kg.”
 The researchers used a Stratasys J750 PolyJet 3D printer to manufacture the four components for the actuator, using VeroClear and VeroBlack material.
The researchers used a Stratasys J750 PolyJet 3D printer to manufacture the four components for the actuator, using VeroClear and VeroBlack material.
“Once clean, the SMP slice I was taken to our self-built DIW device for the fabrication of the Joule-heating circuit,” the researchers wrote. “A syringe was held vertically on the DIW device, and its translations in the printing plane were enabled by linear stages…which were precisely controlled by stepper motors.”
The 3D printed SMP slice with the Joule-heating circuit was placed in a universal oven in order to sinter the Ag NP circuit before being bonded with the body of the actuator. In each spacer between neighboring air chambers in the actuator body, a slot was created in order to receive an insert for the SMP slice.
“The slot-and-insert design would enhance the bonding strength at the interface to better limit the cover layer’s strain under inflation and inhibit the air from travelling outside the central channel,” the researchers explained.
Schematics of VeroClear sample for tensile test. The values are in mm.
Once the bonding interfaces were cured, the team tested how airtight everything was, then inserted conductive wires through the actuator base’s channels, which were connected to the Joule-heating circuit and then sintered. The SMP slice II was bonded with the elastomeric sheet using VeroClear, and the processed parts were bonded together, again using VeroClear.
The researchers performed all kinds of tests on their 3D printed soft actuator, including a DMA test, tensile tests at 25 °C and 70 °C, a stiffness-tunable strip test, and others. A characterization test on a single FRST actuator’s load capacity was completed, and the team also conducted finite-element simulations in an effort to learn more about the stiffness variation mechanism.
The researchers wrote, “To gain insight on potential ways to improve the load capacity, we simulated the bending stiffness tests by varying two parameters, namely the SMP layer thickness and material modulus at room temperature.”
Finite-element simulations were also completed for heating and cooling tests, and the researchers also characterized the printing parameters.
Thermistor glued to innermost surface of SMP component with leads extending out from side edges of the actuator.
The field of soft robotics is helping people change their perception of robots as hard, metal creations to something that is more fluid and flexible. Through their experiments, the joint SUTD/STJU research team found that by adding shape memory polymers to the mix, their 3D printed soft actuator’s body became up to 120 times stiffer, but without sacrificing adaptivity or flexibility – making it far more effective at carrying high loads.
Co-authors of the paper are Yuan‐Fang Zhang, Ningbin Zhang, Hardik Hingorani, Ningyuan Ding, Dong Wang, Chao Yuan, Biao Zhang, Guoying Gu, and Qi Ge.
Discuss this research and other 3D printing topics at 3DPrintBoard.com or share your thoughts in the Facebook comments below.