

Quadrotor frame assembly in exploded view.
Unmanned Aerial Vehicles (UAVs), also known as drones, are agile and resilient enough to be piloted, and monitored, from remote distances. With four flying dimensions and six degrees of freedom for pitch, roll, space, and yaw, drones can be used for a wide variety of applications, such as farming, documenting 3D information about historic archaeological sites, photography, military and defense, acting as first responders during natural disasters and rescue operations, and 3D printing.
Multirotor drones have multiple fixed wings and have a high level of maneuverability, and are classified further based on factors like position, orientation, and number of rotors. A pair of researchers from the University of Bridgeport recently published a paper, titled “Design and Analysis of 3D Printed Quadrotor Frame,” detailing their work using 3D printing to create the frame for a quadrotor drone.

3D printed drone assembly bottom view
The abstract reads, “This research emphasizes more on 3D printing a quadrotor with ‘X’ shaped frame. We built a CAD model of drone frame using SOLIDWORKS, following that; we performed three types of finite analysis 1. Static structural, 2. Impact analysis, and 3. Modal analysis. The drone frame is simulated and analysed under various boundary conditions such as lift, drag, and thrust till the optimized results of minimum displacement, a factor of safety is achieved. We printed the frame of drone on PRUSA I3 Mk3 3D printer by using ABS-PC and carbon fiberglass materials as the filament.”

The researchers designed a CAD model of their X-framed drone in SOLIDWORKS using multiple constraints, including:
- length of the propeller, which determines the length of an arm
- motor rotor diameter and electronic speed controller width, which contribute to determining a drone’s arm width

Highlighted surface area is the fuselage
They designed the arms of the drone to translate force away from the fuselage, which helps electronic components maintain minimal damage if the drone has an accident or fails. The fuselage of a drone is “the eye” of its electronic components, like the receiver, power distribution board, and flight controller, and the duo designed a housing to protect the fuselage’s components in the event of a crash.
The dimensions of their drone frame, which was 3D printed on a PRUSA I3 Mk3 3D printer out of carbon fiberglass and ABS-PC, are 175.14 x 171.42 x 48.75 x 226 mm.
The researchers explained, “To perform FE analysis, the forces acting on a frame are determined, which are 1.The Weight of the frame and all the electronic components on it normal to the ground, 2. Lift force direction is a resultant between thrust and vertical take-off, towards the direction of motion, 3. Thrust generated by the propeller and motor towards the direction of motion and 4. Drag force acting in opposite direction of motion.”

Strain deformation
The researchers manually calculated and applied the forces acting on the 3D printed frame during simulation, which resulted in three plots: Von Mises stress, displacement, and strain deformation. They were able to run a sequences of cycles in SOLIDWORKS where the drone crash-landed, and gained simulation results by compiling all of the collected data. Additionally, they also completed a static structural analysis – a phenomenon called plasticity – by considering a non-linear analysis based on the materials used to make the frame and the rate of deformation, and completed a modal analysis of the 3D printed frame in order to measure the dynamic excitation caused by vibrating motors.
“A 3D printed quadrotor frame with safety factor 2.5 is attained and various finite element analysis performed on the frame are distinctly mentioned and plotted in the figures. Further, we can 3D print a 3- axis gimbal and attach it to our quadcopter for aerial photography. Also, we can upgrade them by attaching few thermal imaging sensors and gas sensors to measure radiation and air pollution at certain heights,” the researchers concluded. “This shows the main advantage of the 3D printed quadcopters and makes them stand distinct to the market-ready drones. We can customize them to make them work in any environment just by changing the printing filaments.”
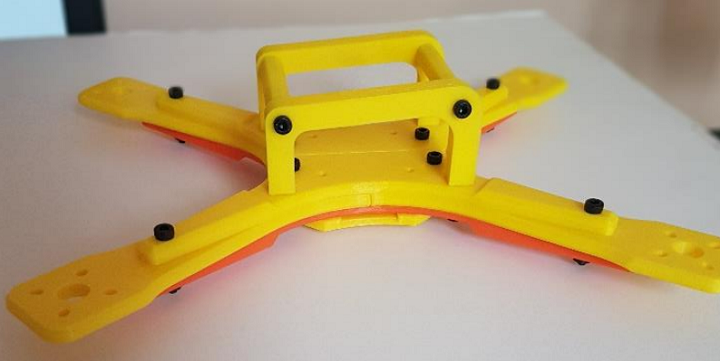
3D printed drone assembly isometric view.
Co-authors of the paper are Sai Mallikarjun Parandha and Zheng Li.
Discuss this and other 3D printing topics at 3DPrintBoard.com or share your thoughts in the Facebook comments below.
140 Replies to “Bridgeport Research Duo Create and Analyze 3D Printed Frame for Quadrotor Drone”
Comments are closed.